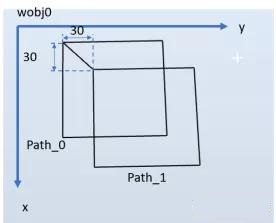
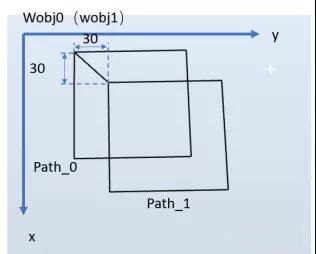
1. 现场机器人在wobj0下有轨迹path_0,现在希望实际运行的时候,轨迹能整体沿着wobj0的x和y方向各偏移30mm,如何快速实现?//基于机器人坐标系平移p003,p003中设置平移的xyz数值 3. 对应ABB机器人RAPID指令为:PDISPSET pose100,其中pose100为pose类型数据,包括trans(xyz)和rot(q1-q4)。Pdispset的偏移和旋转均基于当前使用坐标系,即对于当前坐标系的右乘。 VAR pose pose500:=[[0,0,0],[1,0,0,0]]; pose500.trans:=[30,30,0]; !以下轨迹基于当前轨迹使用的坐标系偏移pose500 MoveL p500,v100,fine,tWeldGun\WObj:=wobj0; MoveL offs(p500,reg1,0,0),v100,fine,tWeldGun\WObj:=wobj0; MoveL offs(p500,reg1,reg1,0),v100,fine,tWeldGun\WObj:=wobj0; MoveL offs(p500,0,reg1,0),v100,fine,tWeldGun\WObj:=wobj0; MoveL p500,v100,fine,tWeldGun\WObj:=wobj0; 4. 若机器人轨迹参考wobj1,wobj1不与wobj0平行,则使用pdispset后,轨迹偏移如下图,即偏移参考wobj1的方向。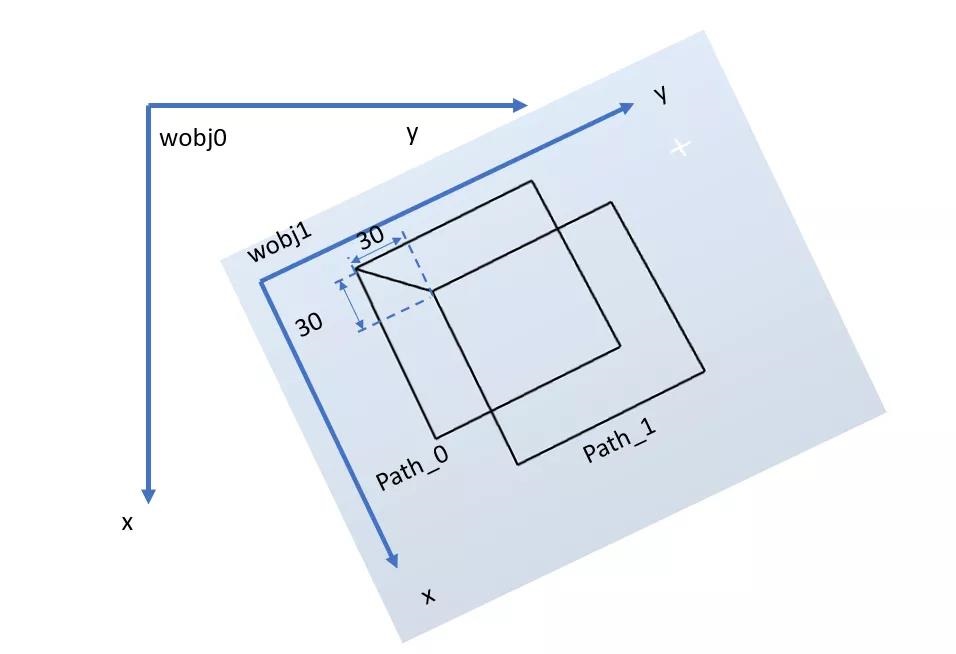
ABB机器人平移指令就说到这里了,以上方法仅供大家参考,希望对你们有所帮助,如有不足之处,欢迎大家留言探讨,如果有需要软件安装包的朋友,可以加小编微信备注我要软件即可获取!小编在看到信息后第一时间给大家奉上!想看更多精彩的文章请持续关注哦。
了解更多ABB机器人
文章来源网络,如有侵权请联系删除